Recently, the University of California, Berkeley and Carnegie Mellon University demonstrated how the ATRIAS footed robot can walk in randomly changing obstacle terrain: Although the height and width of the stepping stones vary randomly, ATRIAS can be like a human Walk the same, cross perfectly.
Like humans and most land animals, legged (foot) robots need to be able to move on rough terrain in order to function in disaster response, search and rescue applications.
However, it is challenging to design a control algorithm that can handle discrete footholds (like gravel or stepping stones), because there are strict constraints on the placement of the feet, and the motion of these systems is controlled by complex dynamic equations of.
The laboratories of the University of California, Berkeley and Carnegie Mellon University have demonstrated the dynamic process of ATRIAS robots walking on stepping stones by using new advances in optimal and nonlinear control systems, even if they are between the stepping stones and their height. The distance varies randomly, and the ATRIAS robot can walk like a human, crossing perfectly.

"One step at a time": The biped robot successfully achieved walking in the simultaneous change of step length and step height
The Hybrid Robotics Group of the University of California, Berkeley has been committed to the development of a formal control framework for biped robots with high degrees of freedom. This framework not only guarantees accurate stepping positions on discrete terrain, but also provides protection against uncertainty and external forces. Perform modeling. These methods are independent of the specific robot itself and have been tested (simulation) on various robot models, including RABBIT, ATRIAS and DURUS.

In addition, these robots do not "know" what the terrain will look like in advance, and only the next position will be displayed to the robot. This scene can well describe the situation that the robot may encounter in the real world.
The team tested the control algorithm on the ATRIAS biped robot platform. It can achieve dynamic walking on discrete terrain with random changes. The step length varies from 30 to 65 cm, and the step height needs to be up/down 22 cm. At the same time maintain an average walking speed of 0.6 m/s.
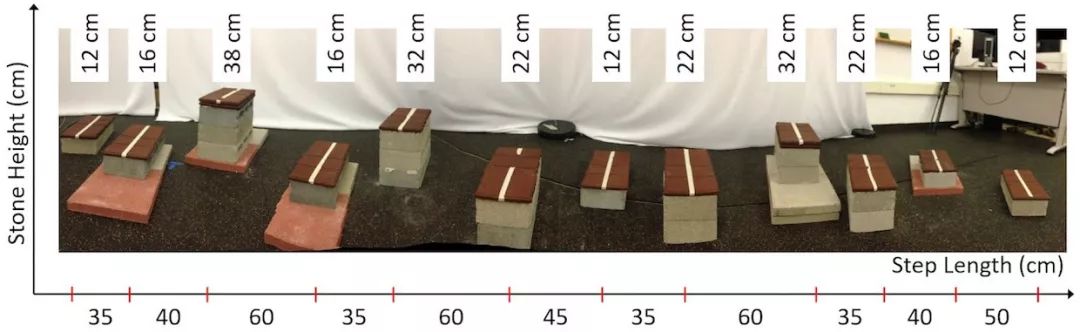
The research team believes that this is the first demonstration of a biped robot that successfully walks dynamically when the step length and step height change simultaneously.
Why is discrete walking so difficult in robots?
First, the biped robot is a highly free system whose motion is controlled by complex nonlinear differential equations that capture the hybrid dynamics of ground interaction: the robot must interact with the environment by constantly making contact with the surrounding environment.
In addition, the robots used by the team, such as ATRIAS, are underactuated, which means that the robot’s ankles have no actuators, only fixed-point feet. This is equivalent to stepping on stepping stones or climbing stairs on stilts. The only way to maintain balance is to keep walking.

Stepping stones also strictly limit the placement of the feet, and in the real world these stepping stones may also collapse. In addition, the robot must work within other physical limits, such as motor torque limits and friction (the robot cannot slide). All these constraints interact to make it very important to control the design process.
The stepping-stones problem has been extensively studied, and impressive results have been achieved on robots such as Valkyrie and ATLAS.
The difference in the team's research is that they allow dynamic walking instead of the slower quasi-static motion that robots tend to use. By reasoning about nonlinearities in system dynamics and using the latest advances in optimal and nonlinear control technology, the control objectives and desired robot behavior can be specified in a simple and compact form, while providing formal stability and safety guarantees . This means that the robot can walk on discrete terrain without slipping or falling.
Future: It is expected to develop a completely autonomous system
The team’s robot is currently “blind†and needs to provide information about its surroundings, such as the location of the next stepping stone. The team is now working on integrating computer vision algorithms, including depth segmentation and deep learning of the controller. This will allow the robot to reason about its surroundings and develop a fully autonomous system. With the arrival of a new robot Cassie in Berkeley, the team plans to extend the experimental results to 3D walking on stepping stones in the real world.
In the long term, this research will help biped robots to navigate autonomously in indoor environments (such as stairs and narrow corridors) and outdoor environments (such as forest paths). The key parts of the research include safety, robustness, and agility, that is, the hope that robots can walk in the "correct" position to prevent them from falling, while maintaining strong robustness against unexpected forces and disturbances.
There are many potential applications of this technology: in search and rescue, automated humanoid robots can be deployed instead of human rescuers; to help explore unknown areas on other planets, or as personal robots at home. In addition, the methods developed for biped robots can also be transformed into robotic devices that enhance humans, such as lower limb exoskeletons.
Mini PC
Are you tired on big and messy wires on traditional computer tower? If yes, mini pc bring clean and space saving working environment back to you. Whatever daily tasks, like browsing web pages, documents checking or making, online teaching or learning, entertainments, etc. Or heavy duty handling, like photshops, video or music editing, gaming, apps developing, engineering drawing, designing jobs, etc. You can always find a right pc mini intel at this store.
Mini PC Office is an most and popular series designed for those who mainly run WPS, photoshops, PR, email, entertainments, etc. Sometimes, also call it as mini pc officeworks or home assistant mini pc.
Mini Gaming PC comes with higher level processors, like intel i3, i5, i7 10th, 11th or 12th; bigger memory and storage, like 16GB or 32GB ram, 512gb up to 1tb. Of course, rich slots support linking with two or more monitors or devices.
Except mini pc windows 11, there are also All In One PC , Student Laptop, Gaming Laptop , Android Tablet, Yoga Laptop , etc.
Mini PC Windows 11,High Performance Mini PC,Mini PC DDR4,PC Mini Intel
Henan Shuyi Electronics Co., Ltd. , https://www.shuyiminipc.com